Dobb·E
About Dobb·E
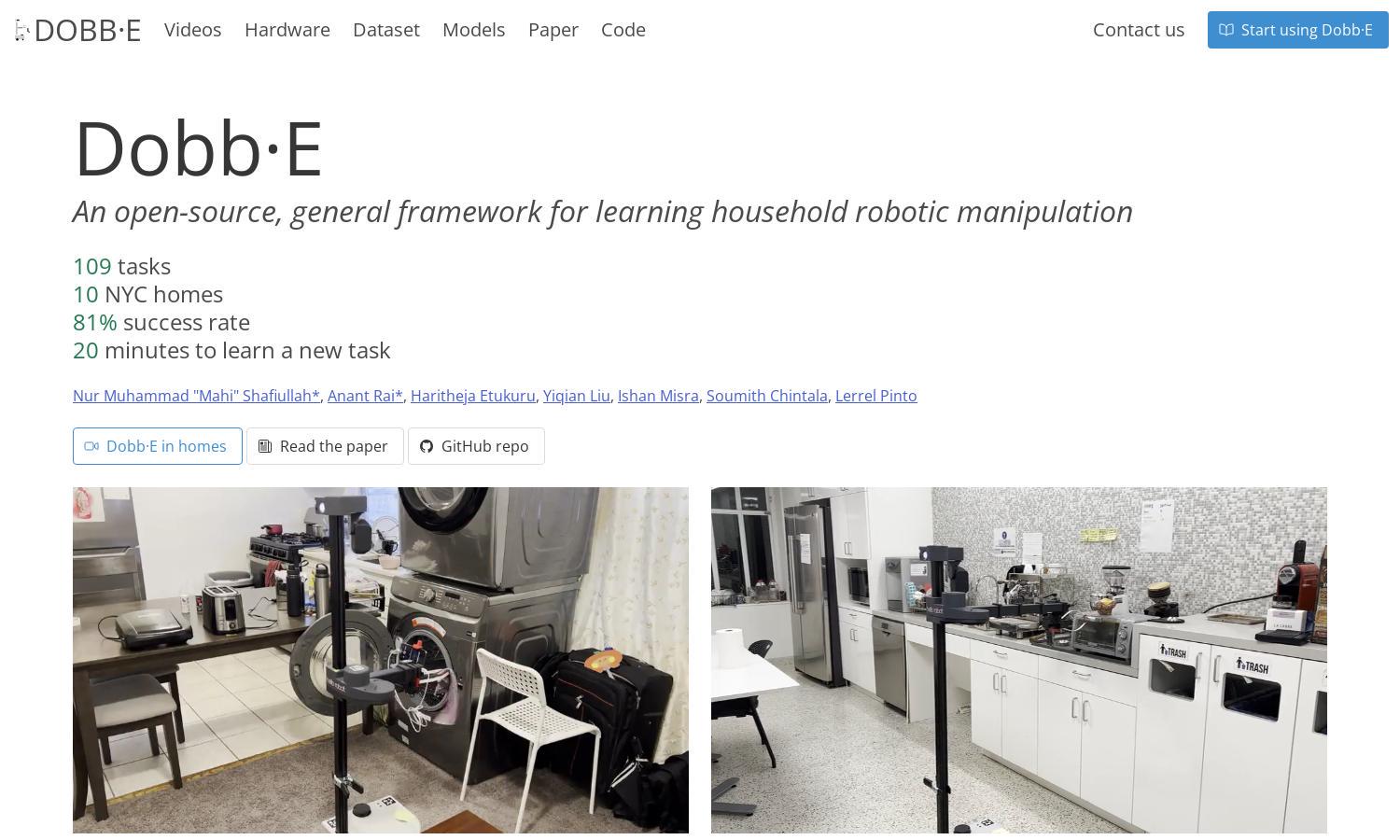
Dobb·E is a revolutionary open-source framework designed to teach robots household tasks through imitation learning. By utilizing a unique tool called the Stick, users can quickly demonstrate tasks, allowing Dobb·E to learn and adapt, achieving a high success rate in varied home environments.
Dobb·E offers free access to its open-source framework with no subscription fees. Users benefit from the availability of the dataset, models, and hardware designs, ensuring they can fully utilize Dobb·E's capabilities without any financial barriers while fostering innovation in home robotics research.
The Dobb·E user interface is designed for simplicity and ease of use. Its intuitive layout ensures that users can swiftly navigate through features, view videos, access documentation, and interact with the demonstration tool. Such design enhances the overall experience, making robotics accessible to many.
How Dobb·E works
Users start by downloading Dobb·E's framework and hardware designs. After onboarding, they use the Stick to demonstrate tasks for the robot to learn. Dobb·E collects this data and processes it to develop robust home manipulation skills, allowing the robot to execute tasks efficiently within minutes.
Key Features for Dobb·E
Imitation Learning
Dobb·E's imitation learning feature enables robots to quickly grasp household tasks by observing live demonstrations. This innovative approach simplifies robot training, allowing users to achieve high success rates with minimal effort, ultimately enhancing home automation capabilities seamlessly.
Homes of New York Dataset
The Homes of New York (HoNY) dataset is a unique collection of 13 hours of interaction data obtained across 22 homes. This extensive dataset empowers Dobb·E, providing a rich resource for training robots in various domestic environments, ensuring well-rounded learning experiences.
Home Pretrained Representations (HPR)
Home Pretrained Representations (HPR) is a groundbreaking model that uses the HoNY dataset for pre-training. This model equips robots to adapt quickly to unfamiliar tasks, significantly reducing the time required for them to learn and perform efficiently in new environments, maximizing user convenience.








